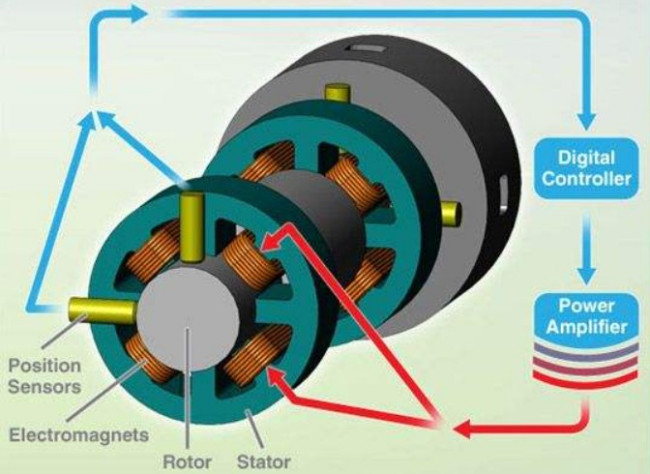
磁悬浮原理:磁悬浮技术的系统,由转子、传感器、控制器和执行器4部分组成,其中执行器包括电磁铁和功率放大器两部分。
假设在参考位置上,转子受到一个向下的扰动,就会偏离其参考位置,这时传感器检测出转子偏离参考点的位移,作为控制器的微处理器将检测的位移变换成控制信号,然后功率放大器将这一控制信号转换成控制电流,控制电流在执行贺含磁铁中产生磁力枯哗;
从而驱动转子返回到原来平衡位置。因此,不论转子受到向下或向上的扰动,转子始终能处于稳定的平衡状态。
扩展资料
超导斥力悬浮:
除了抗磁质外超导体处于超导态时,由于迈斯纳效应磁通不能穿透超导体,其磁化率等于-1,所以其满足布鲁贝克推论的条件,这种悬浮称为超导体斥力悬浮。
超导钉扎悬浮:
对于非理想第二类超禅败笑导体来说,其具有钉扎效应,当非理想第二类超导体处于混合态时,非理想第二类超导体可以俘获并钉扎磁力线,与磁场产生钉扎力,利用钉扎效应也可以产生磁悬浮,这种悬浮称为钉扎悬浮或者量子悬浮。
涡流悬浮:
对于常规磁介质,比如弱磁性材料,其相对磁导率接近于1,当其表面或者内部产生涡流时,相当于产生抗磁效应,使物体等效相对磁导率小于1。
当然涡流悬浮也可以利用,楞次定律来解释。涡流悬浮通常使用交流电源、电磁铁和导电的弱磁材料比如铜、铝作为悬浮物体。
参考资料:百度百科-磁悬浮技术
版权声明:文章由 百问九 整理收集,来源于互联网或者用户投稿,如有侵权,请联系我们,我们会立即处理。如转载请保留本文链接:https://www.baiwen9.com/life/123156.html